Nitra těch nejponičenějších fukušimských reaktorů, především I., jsou místy, o kterých určitě nemáme dostatek informací. Lidé se do nich určitě v brzké době nepodívají a problémy má i technika. Nedávno se do prvního reaktoru podařilo nahlédnout pomocí kosmických mionů. Potvrdil se přitom neveselý předpoklad, že v místě, kde by měla být aktivní zóna (místo, kde při normálním provozu probíhá štěpná řetězová reakce), zřejmě vůbec není palivo. Naznačuje to, že aktivní zóna je zničena a z velké části se roztavila.
Nyní je důležité zjistit, kam se radioaktivní palivo podělo. Nikam daleko neuniklo, to by detektorům radioaktivity nemohlo ujít. Bude tedy někde pod reaktorem. Hlavní otázkou je, zda se roztavené palivo zachytilo ve spodní části reaktorové nádoby, nebo se protavilo až do spodní části kontejnmentu (ve Fukušimě ocelové obálky s vrstvou železobetonu za ocelí kolem celého reaktoru). To totiž výrazně ovlivní náročnost a průběh odstraňování škod po havárii.
Had v reaktoru
Nejen uvnitř kontejnmentu je ve zničených blocích velmi vysoká radiace, a proto lze průzkum a práce v řadě míst provádět pouze roboty, které v elektrárně odvedly spoustu práce (viz Fukušima robotická). To byl důvod, proč řada firem vyvíjí značný počet velmi
různorodých typů takových zařízení.
Jedním z nových přírůstků do rodiny fukušimských robotů je i společné dítko firmy Hitachi a ústavu IRID (International Research Institute for Nuclear Decommissioning). Byl navržen tak, aby mohl potrubím proniknout přímo do reaktorového kontejnmentu a zkoumat jeho nitro.
Fukušima robotickáRoboty snímaly kamerou situaci a měřily radiaci v silně kontaminovaných prostorách budov. Prováděly vrty a sběr vzorků, které umožnily získat představu, jakého je charakteru a jak hluboko do stěn se dostala kontaminace. Některé z nich umožnily vytvořit na podlaze a stěnách vrstvu suchého ledu, na které se zachytily kontaminované částice, a pak se spolu s ní daly lépe odstraňovat. Těžké roboty sbíraly větší a těžší silně kontaminované objekty a některé dokážou manipulovat s dveřmi, ventily i dalším složitějším zařízením. Práce robotů lidem umožnila postupně začít pracovat na místech, kam dříve nemohli. Stroje například zpřístupnily některé technické prostory, ze kterých lze zahájit pomocí přístrojů a čidel průzkum vysoce radioaktivních oblastí kontejnmentů (například zasunutím endoskopu přes trubky a otvory vedoucí do nitra reaktorů). „Obsazení“ těchto míst také postupně rozšiřuje možnosti nasazení robotů dále a hlouběji do budov. Roboty je nutné řídit pomocí kabelů, bezdrátové spojení je v komplikovaných prostorách betonových budov často nemožné. Navíc je v silné radiaci výhodné mít elektronické prvky robota co nejjednodušší a velkou část elektroniky umístěnou mimo dosah radiace. Roboty mají potíže také s velmi členitým terénem a řadou nečekaných překážek v budovách. Už se stalo, že se zaklínily, nebo přestaly být ovladatelné kvůli zničení kabelu. Kráčející a plovoucí roboty zkoumají poškození kontejnmentu v oblasti propojení jeho suché části s komorou potlačení. První poškození, kterým se dostává voda z konteajnmentu do suterénu budovy našly roboty u prvního reaktoru. Oprava všech netěsností by mohla umožnit vyplnit kontejnment vodou. Ta by odstínila radiaci, umožnila by sejmout víko kontejnmentu a zjednodušila práci na likvidaci zničených aktivních zón. |
Robot se trochu podobá tlustému hadovi. V natažené pozici je dlouhý 60 cm, má hmotnost 7,5 kg, výšku 9 cm a šířku 6,5 cm. Robot se skládá ze tří částí, dvou pohybových sekcí pro lezení a hlavní centrální. Nezvyklý tvar je navržen s ohledem na to, aby stroj mohl prolézt rourami s průměrem nad deset centimetrů a zahnutými i do pravého úhlu.
Zároveň nemá být ani zcela nemotorný, když z roury vyleze na místo určení. Dokáže tedy zaujmout tvar písmene U s pohybovými sekcemi po stranách, ve které je mnohem stabilnější než v poloze „hadí“.
Robot je vybaven kamerou, dozimetrickými přístroji (na měření úrovně radiace) a teploměry, které umožňují prozkoumat stav vnitřních částí kontejnmentu. Ovládání a přenos informací zajišťuje 40 metrů dlouhý kabel.
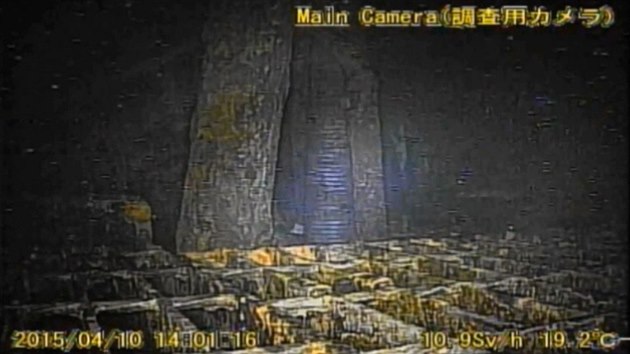
První „had“ se do nitra reaktoru číslo 1 vydal v pátek 10. dubna. Původní plán byl, že po dosažení roštové podlážky mezipatra v kontejnmentu obkrouží robot její vnitřní část a zmapuje její stav. První polovina měla být prozkoumána v pátek a tato část měla mít osmnáct zastávek a měřicích míst.
Podařilo se dosáhnout čtrnácté zastávky, kde se stroj v úzkém a nepřehledném přestal pohybovat, zřejmě uvázl. S největší pravděpodobností se zasekl mezi dvěma konstrukcemi v nejkomplikovanějším a nejužším místě cesty. Záběry ukazují nějakou trosku a velmi blízká potrubí.

Hadovitý robot vyvinutý ústavem IRID a firmou Hitachi
Do té doby stroj urazil deset metrů, tedy zhruba dvě třetiny na pátek plánované trasy. Další část trasy okolo vnitřní části kontejnmentu podpírající reaktorovou nádobu, která se měla uskutečnit v pondělí, se tak už nerealizovala. Robot vysílal data ještě další dva dny, ale rozhýbat se ho už nepodařilo. Operátoři se proto rozhodli přeseknout ovládací a napájecí kabel a nechat robota v kontejnmentu.

Robot se dostal na roštovou podlahu mezipatra, je již ve tvaru U a zahájil průzkum. Dobře je vidět i řídící kabel.
Výsledky první zkoušky jsou tedy smíšené. Senzory a elektronika robota vydržely i velmi vysokou radiaci a zůstávají i v těchto těžkých podmínkách funkční alespoň pár dnů. Na druhé straně se ukázalo, že pouť robota byla mnohem komplikovanější, než se předpokládalo. Fyzikální podmínky v kontejnementu byly přitom zhruba takové, jak se předpokládalo na základě odhadů a předchozích (byť velmi neúplných) měření. Teplota v reaktoru byla 20 °C, tedy zhruba stejná jako při měření v říjnu 2012.
Stejně jako v té době byla také uvnitř kontejnmentu naměřena velmi vysoká radiace. V různých místech cesty se dávkový příkon pohyboval mezi 7 Sv/hod až 13 Sv/hod, i když na videu se objevuje krátké zvýšení dávkového příkonu přesahující 15 Sv/hod. To jsou vysoké hodnoty představující pro člověka smrtelné nebezpečí, takže lidé v těchto místech velmi dlouho pracovat nebudou. Nejde ovšem o překvapení: hodnoty kolem 10 Sv/hod byly zaznamenány i v suterénu v blízkosti komory potlačení tohoto bloku u hladiny zde nashromážděné vody.

Ukázka několika fotografií s různými troskami, které byly pořízeny robotem s vyznačením místa, kde byly získány (černě vyznačeno místo, kde robot uvízl). Na fotkách je žlutě měřítko.
I když tedy robot nebyl plně úspěšný, ukázal, že může úspěšně pracovat po delší dobu i v takto náročném prostředí. I proto ve středu 15. dubna došlo na použití druhého robotu stejného typu, který byl také vysazen do prvního reaktorového bloku a pronikl úspěšně do kontejnementu. Ten se vydá v opačném směru a prozkoumá druhou část prostoru. Přejme mu ještě větší úspěch než jeho předchůdci.
Další stroje by si tedy s velkou pravděpodobností měly vést ještě lépe a plánované úkoly splnit. Jejich prvním úkolem bude zkontrolovat stav poškození kontejnementu I. bloku, ve kterém je podle modelů i dosavadních měření situace nejhorší. I díky nim by časem mělo být možné přesně určit, zda došlo k protavení tlakové nádoby a kolik taveniny se dostalo do spodní části kontejnmentu.
Na průzkum ovšem nebudou dost možná stačit jen „hadi“. Případná ztuhlá tavenina je totiž ponořená v chladicí vodě na dně kontejnmentu pod roštovou podlahou. Pro její prozkoumání tak bude potřeba mít vodotěsného robota, který se dostane pod roštovou podlahu a ponoří se do této vody. Takový robot by měl být k dispozici v roce 2016. Zatím by se však mělo dokončit skenování pomocí kosmických mionů i u druhého bloku a robot-had podobný tomu současnému by se mohl dostat také do kontejnmentů druhého i třetího bloku.
Jak na likvidaci

Schéma průzkumu kontejnmentu prvního bloku pomocí hadovitého robota. Robot se bohužel zarazil v bodu B14 v pravé části schématu.
Informace od robotů budou klíčové pro odhad toho, jak náročná bude likvidace zničených aktivních zón a jak dlouho potrvá. Nejlepší by bylo, kdyby byl kontejnement v takovém stavu, aby se podařilo najít a opravit všechny případné netěsnosti. (Úplně ideální by bylo, kdyby navíc tavenina z aktivní zóny zůstala přímo v reaktorové nádobě a nevytekla z ní.) V takové situaci by totiž bylo možné ho snadno naplnit vodou, která pak odstíní radiaci. Díky tomu by bylo možné sundat hlavu kontejnmentu i tlakové nádoby a pracovat na likvidaci aktivní zóny shora.
Méně příznivé by bylo, kdyby roztavené reaktorové jádro vyteklo až na dno kontejnementu. Ještě horší pak, pokud je kontejnment značně poškozený. V tu chvíli by plnění vodou bylo nemožné a všechny práce by musely probíhat z boku. To se zdá jako banální rozdíl, ale bez stínění vodou bude mnohem těžší zajistit odpovídající radiační ochranu.
Vladimír WagnerPracuje na oddělení jaderné spektroskopie v Ústavu jaderné fyziky AVČR v Řeži u Prahy. Zabývá se výzkumem horké a husté jaderné hmoty pomocí srážek relativistických těžkých iontů a možnosti transmutace jaderného odpadu intenzivními toky neutronů. Byl členem Nezávislé energetické komise II, která pod vedením Václava Pačese a Dany Drábové připravovala pro Ministerstvo průmyslu a obchodu analýzu stavu a perspektiv vývoje české energetiky. |
V každém případě bude konečná likvidace zničených zón trvat desetiletí. Ale není příliš kam spěchat. Po vyklizení všech bazénů s vyhořelým palivem, vyřešením situace s radioaktivní vodou a dostatečné dekontaminaci areálu elektrárny i budov nebudou představovat kontejnmenty se zničenými reaktory riziko pro okolí.
Nejde přitom o úkoly, které by měly zabrat příliš dlouhou dobu. Čtvrtý bazén už byl vyklizen, vyklízení těch ostatních by mělo být dokončeno v roce 2019. Už se také podařilo zprovoznit dostatečnou kapacitu zařízení na dekontaminaci radionuklidů ve vodě (s výjimkou tritia) a v příštím roce by mělo dojít k vyčištění veškeré vody v areálu.
Radiační situace v elektrárně už je také o hodně příznivější. V řadě oblastí už pracovníci nemusí používat úplné masky a mohla být omezena striktní opatření. Také v budovách už je na řadě míst možno pracovat. Podrobněji se o vývoji situace ve Fukušimě I se píše v cyklu článků a serveru Osel, poslední článek je zde.


