
Konstrukce robotka je velmi inspirována bruslařkou obecnou, latinsky Gerris lacustris. To je drobný rovnokřídlý hmyz o hmotnosti 0,01 gramu, který se po dlouhých tenoučkých končetinách dokáže pohybovat po vodní hladině, aniž by ji narušil. Využívá k tomu povrchového napětí, které na hladině vzniká.
Toto zvířátko se v angličtině nazývá "water strider", robot dostal označení STRIDE. Navzdory podobnosti jmen je název robotka akronymem pro Surface Tension Robotic Insect Dynamic Explorer.
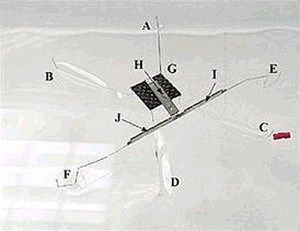
A,B,C,D - podporné nohy
E,F - směrové nohy
G - tělo s elektronikou a elektrickým zdrojem
H - střední piezoelektrické pohonné zařízení
I,J - směrové piezoelektrické pohonné zařízení
zdroj: Yun Seong Sonh and Metin Sitti
Pro průzkum i pro zábavu
Robota vyvinul student Yun Seong Song a odborný asistent Metin Sitti z Carnegie Mellon Univerzity. Ačkoli se, stejně jako bruslařka, nedokáže pohybovat po souši, na vodní hladině je snadno ovladatelný a nepotopí se. Zatímco bruslařka vyvine rychlost až 1,5 m/s, první robotek zatím dosáhl 3 cm/s.
Vědci předpokládají, že budou STRIDER roboti používány k výzkumu a monitoringu životního prostředí a vzdělávacím a zábavním účelům. Robot je vybaven bezdrátovým komunikačním rozhraním, kterým je jednak ovládán, a v budoucnu jím bude zasílat i získaná výzkumná data.
Optimálně konstruovaný robot, vybaven dvanácti pěticentimetrovými hydrofobickými nohami z drátků potažených teflonem, dokáže unést užitečnou zátěž až 9,3 gramu. Pohyb po hladině zajišťuje trojice piezoelektrických pohonných systémů, rozmístěných ve tvaru T. Díky tomu může vytvářet vertikální i horizontální tah, potřebný pro eliptický "veslovací" pohyb, kterým se bruslařka po hladině pohybuje. Mimo jízdy vpřed se dokáže otáčet i couvat.
Jezdí i po kaluži
STRIDER se dokáže pohybovat i po velmi nízké hladině vody, stačí 3 - 4 mm hloubky. Jak dodává profesor Sitti, minimální použitelná hloubka se bude lišit podle velikosti konkrétního robota - počítají totiž s vývojem menších i větších robotů. Prozatím je robot desetkrát větší než bruslařka.
Dosavadní zařízení, které se dokázaly pohybovat po hladině, využívaly vodního vztlaku. K tomu potřebovaly nízkou hmotnost a velkou plochu, kterou na hladině ležely.

